
Главная » CADmaster №1(68) 2013 » Изыскания, генплан и транспорт GeoniCS Траектории движения (Autopath): профессиональное решение для анализа траекторий движения колесных транспортных средств
Программа GeoniCS Траектории движения (Autopath) — это профессиональное решение для анализа траекторий движения транспортных средств в плане и профиле. Оно применяется при анализе маневренности и клиренса транспорта на обычных и круговых перекрестках, парковках, в аэропортах, транспортных терминалах, на строительных площадках
Разработка используемых в программе алгоритмов была задачей не из легких. С целью смоделировать максимально приближенные к реальности результаты, проверить и улучшить их, было принято решение использовать GPS-измерения с реальных транспортных средств. Для этого использовался грузовой автомобиль с прицепом и три точных устройства GNSS (GPS), которые применялись для обработки данных. Одно из них было помещено на кабину, другое — на прицеп, третье — над областью сцепки так, чтобы при каждом измерении можно было восстановить положение транспортного средства при любых маневрах. В то время как водитель автомобиля осуществлял ряд согласованных маневров, каждую секунду фиксировались GPS-координаты. Полученные данные были проанализированы в среде AutoCAD. После этого производилось сравнение результатов моделирования с использованием GeoniCS Траектории движения (Autopath), которые ранее были получены для точно такого же автомобиля, с полученными при использовании GPS-устройств.

GeoniCS Траектории движения (Autopath) без лишних трудозатрат и без ущерба для надежности решает все проблемы, возникающие при анализе траекторий движения транспортных средств, а также позволяет приступить к работе без значительной подготовки благодаря интуитивно понятному интерфейсу. Результаты анализа представляют собой графические данные в виде линий движения колес, осевых, а также контурной линии крайних точек кузова транспортного средства с учетом маневров, которая может опционально отображаться в виде заштрихованной области. Все объекты — динамические, при изменении с помощью «ручек» геометрии одного из них перестраиваются и все связанные с ним элементы.
|
|
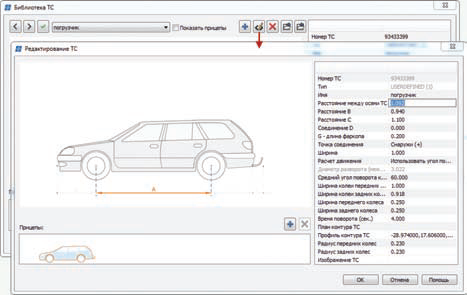
В стандартную поставку включены различные библиотеки транспортных средств, которые можно задавать в настройках. Библиотеки пополняемые, что позволяет самостоятельно добавлять свои транспортные средства (ТС) и использовать их при анализе движения. Библиотеку можно пополнять различными колесными транспортными средствами, даже самолетами при анализе траекторий движения на аэродромах и в ангарах. В программе также открыты технические параметры для редактирования при изменении ранее добавленных ТС или создании новых на основе имеющихся. Новые объекты библиотеки ТС можно легко передавать на другие рабочие места посредством импорта и экспорта. Имеется возможность создавать и добавлять прицепы с различными параметрами и в любом количестве, создавая таким образом автопоезда.
|
|
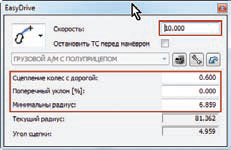
GeoniCS Траектории движения (Autopath) по существу представляет собой набор инструментов для компьютерного моделирования геометрических свойств автотранспорта с учетом их геометрии и различных ограничений, таких как скорость движения, сцепление колес с дорогой, поперечный уклон и минимальный радиус.

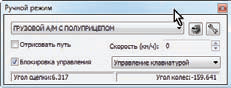
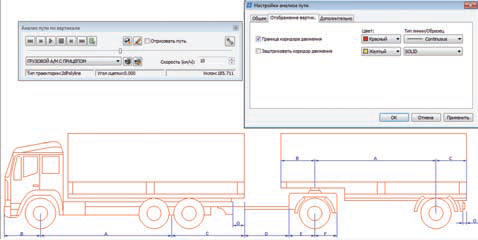
При анализе траектории пути автотранспорта в плане программа позволяет применить два режима: Easy Drive (интерактив ный) или ручное управление при помощи клавиш клавиатуры или мыши. После этого задается направление хода транспортного средства: задний или передний. Также имеется возможность задавать траекторию движения транспортных средств по трассам AutoCAD Civil 3D или полилинии.
Во всех режимах рассчитываются заносы как по передней, так и по задней части автотранспорта, отображаются линии по оси ТС и траекториям колес, производится отрисовка габаритных зон по крайним точкам. В результате можно с необходимой точностью запроектировать зоны движения автотранспорта в стесненных условиях на перекрестках, узких участках дорог, крутых поворотах и стоянках.
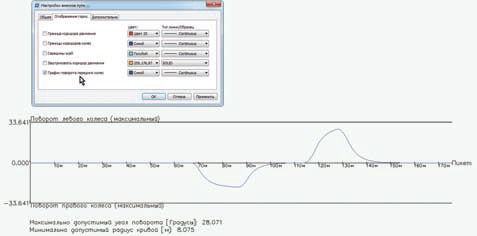
Во время моделирования траекторий движения ТС можно изменять параметры скорости и другие исходные параметры, необходимые для правильного выполнения маневрирования. При этом в нижней части панели отображаются статистические данные, характеризующие положение в данной точке: радиус, угол сцепки и угол колес на «рулевой» оси. После того как моделирование завершено и его результаты отредактированы, при необходимости можно выполнить демонстрацию по полученной траектории, запустив команду Динамические кривые движения и выбрав осевую линию. Также можно по выбранной траектории вставить в чертеж график поворота передних колес.
|
|
Для анализа траектории движения автотранспорта в профиле достаточно выбрать в чертеже линию профиля или полилинию.
Затем выполняются начальные установки: выбирается транспортное средство, задается скорость, делается настройка отображения траектории.
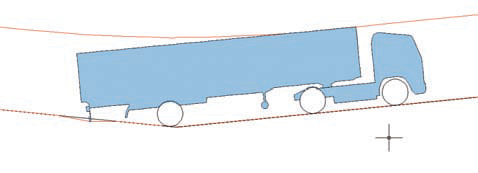
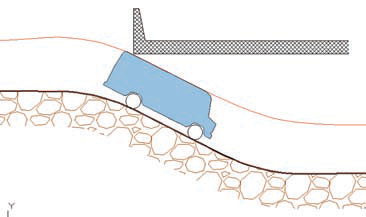
Можно визуально просмотреть дорожный просвет автомобилей под задним бампером. Искривление нижней границы коридора движения указывает на место нарушения габарита.
Аналогично анализируется дорожный просвет под передним бампером и поддоном.
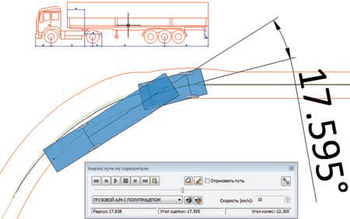
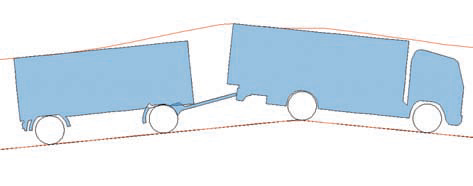
Можно также визуально проконтролировать угол сочленения между транспортным средством и прицепом в профиле. Очень удобно просматривать вертикальный габарит автотранспорта при въезде/выезде с подземных автостоянок.
На практике часто возникают ситуации, когда необходимо проанализировать вертикальный габарит при заезде/съезде с различных пандусов. Это также легко сделать с помощью GeoniCS Траектории движения (Autopath).
С помощью кнопки Следовать за мышью очень удобно просмотреть габарит в любом месте профиля.
|
|
|
|
Задав скорость и включив анимацию, можно в динамике просмотреть траекторию движения автотранспорта в профиле. В правом нижнем углу диалогового окна отображается уклон профиля в градусах. Подводя итог, можно с уверенностью сказать, что программа GeoniCS Траектории движения (Autopath) является прекрасным инструментом для анализа движения автотранспорта в плане и профиле. Функционал программы, несомненно, будет востребован не только специалистами по проектированию автомобильных дорог, но и генпланистами (особенно при проектировании в стесненных условиях). Не исключено, что программа заинтересует и технологов в различных областях деятельности, так как в ней существует возможность добавления различных специфических транспортных средств.
главный специалист отдела «Изыскания, гентан и транспорт»
Денис Степанов,
главный специалист отдела «Изысканияу гентан и транспорт»
CSoft
Тел.: (495) 069−4488
E-mail: penkov@csoft.ru,
denis.stepanov@csoft.ru
Скачать статью в формате PDF — 438.8 Кбайт |


