
Главная » CADmaster №6(67) 2012 » Машиностроение Без права на ошибку
Проект NASA Mars Science Laboratory явился первой в истории полностью роботизированной миссией, в ходе которой на поверхность красной планеты успешно приземлился марсоход Curiosity (рис. 1). Место приземления — кратер Gale, дата приземления — 5 августа 2012 года. Примечателен тот факт, что фаза приземления осуществлялась с помощью уникального устройства Sky Crane, что в переводе с английского означает «небесный кран» — летающая посадочная платформа, которая, в конечном итоге, плавно опустила марсоход на поверхность красной планеты (рис. 2).
|

|
Использование «небесного крана» требовало точного исполнения определенного набора команд и действий на завершающем этапе спуска, необходимых марсоходу для перехода от полетной конфигурации к посадочной. Последнюю стадию спуска инженеры NASA красноречиво назвали «семью минутами ужаса», так как кроме сверхсложности технической реализации этого этапа марсианской программы дело усложнял еще и тот факт, что вмешательство человека с Земли в данный процесс было невозможно.
Кроме того, полномасштабная натурная отработка всех элементов процесса посадки также была невозможна ввиду практической невозможности воссоздания природных условий Марса на Земле. Специалистами лаборатории реактивного движения NASA (NASA Jet Propulsion Laboratory (JPL) было принято решение о компьютерном моделировании всех этапов спуска Curiosity в программном комплексе Adams, созданном корпорацией MSC Software. Выбор этого программного комплекса был не случаен, так как Adams около 30 лет используется инженерами по всему миру и представляет собой совершенный инструмент для моделирования динамики и кинематики многомассовых систем. Также Adams позволяет производить сложные связанные расчеты в постановке «динамика-прочность» с включением упругих компонентов из конечно-элементных программных комплексов, таких, например, как MSC Nastran.
Компьютерное моделирование сразу выявило ряд технических проблем еще на начальной стадии проработки дизайна будущей конструкции и позволило инженерам в кратчайшие сроки и с минимальными затратами сделать конструкцию более надежной и рациональной. Расчеты в Adams проводились параллельно с проектированием, что позволило оперативно внести необходимые изменения в конструкцию и тем самым предотвратить возможные проблемы и сбои на различных этапах спуска, включая фазы разделения, спуска, приземления и развертывания марсохода на поверхности (рис. 3).
Одной из первых проблем, которую удалось решить с помощью Adams, стала высокая вероятность столкновения марсохода и «небесного крана» на протяжении всей фазы спуска марсохода на тросах. Кроме того, был проведен ряд расчетов по моделированию процесса отделения марсохода от летающей платформы при различных скоростях приближения к поверхности.
Использование Adams позволило инженерам смоделировать все этапы процесса посадки марсохода и принять верные решения, которые имели огромное значение для всеймарсианской программы. С помощью Adams специалисты NASA смогли точно определить силы и нагрузки, действующие на узлы и компоненты Curiosity на всех стадиях посадки марсохода.
Программное обеспечение системы управления «небесного крана» было интегрировано в среду Adams для конечной отладки всех команд и элементов этой системы. Точность же моделирования и расчета была доказана безоговорочным успехом марсианской миссии.
Следует отметить и то, что Curiosity примерно в два раза длиннее и в пять раз тяжелее своих предшественников — марсоходов Spirit и Opportunity. Посадка такой большой полезной нагрузки на Марсе сама по себе сложная инженерная задача, так как атмосфера Марса, с одной стороны, слишком разреженная для парашютов и иных аэродинамических систем торможения, а с другой — достаточно плотная для создания проблем с тепловой защитой и стабилизацией спускаемого аппарата после отделения от перелетной ступени. Вес марсохода составил 900 кг, и это явилось одним из ключевых факторов, повлиявших на выбор способа посадки с использованием мобильной летающей платформы, или «небесного крана», имеющего в своем составе собственную тормозную двигательную систему и систему ориентации.
Еще одна задача моделирования с помощью программных продуктов MSC Software состояла в отработке всех стадий посадки марсохода в автономном режиме, вследствие того что 14-минутная задержка радиосигнала полностью исключила возможность интерактивного управления транспортной посадочной системой с Земли. Малейшая ошибка на спуске — и марсоход мог навсегда исчезнуть в облаке пыли, похоронив надежду на успешное завершение миссии еще на начальном этапе.
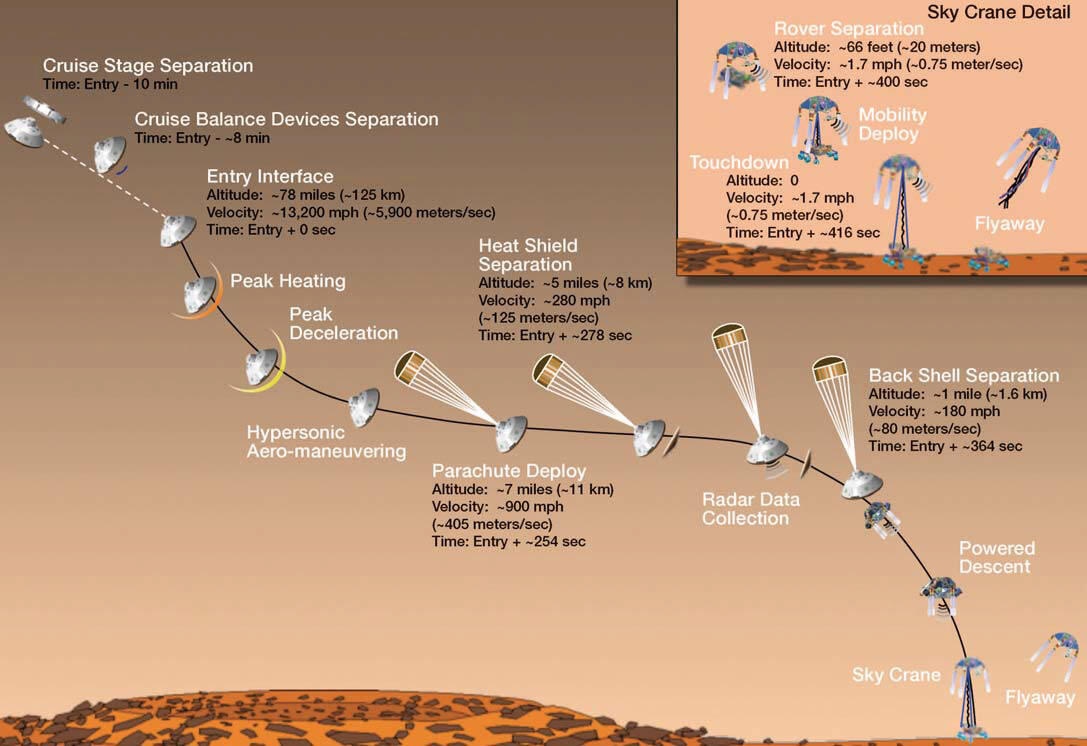
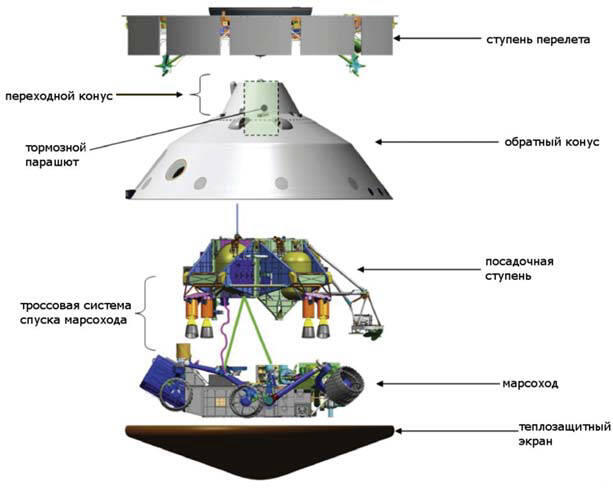
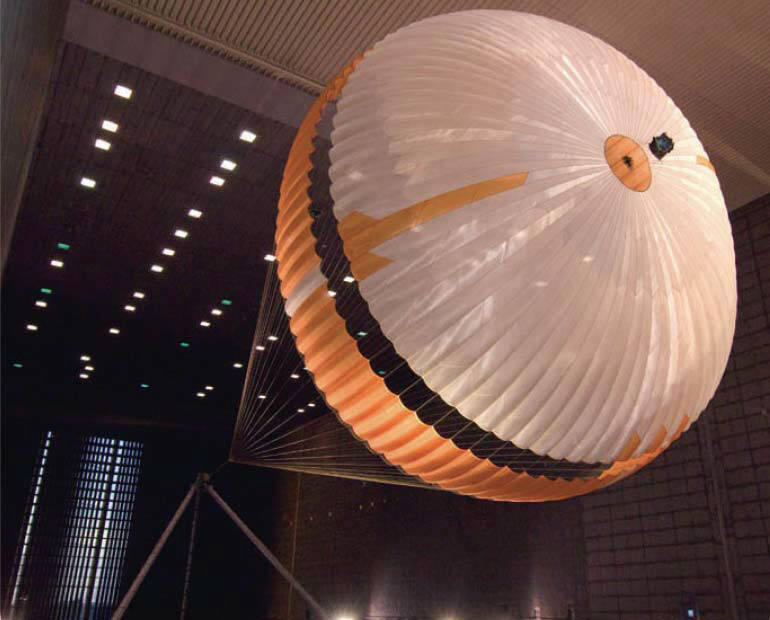
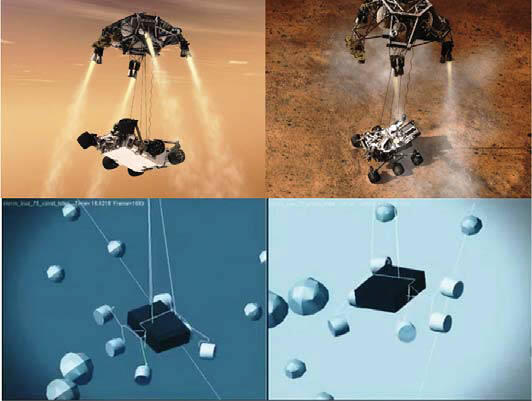
Инженеры NASA создали уникальную транспортную посадочную систему, состоящую из внешнего корпуса, теплозащитного экрана, марсохода Curiosity, «небесного крана» и парашютной тормозной системы (рис. 4). Посадочный модуль отделился от перелетной ступени за десять минут до входа в атмосферу Марса и включил двигатели ориентации теплового экрана, чтобы развернуть экран навстречу набегающему сверхзвуковому потоку марсианской атмосферы. После того, как скорость входа в атмосферу упала до 578 метров в секунду, примерно в 10 километрах от поверхности Марса раскрылся сверхзвуковой парашют (рис. 5).
|
|
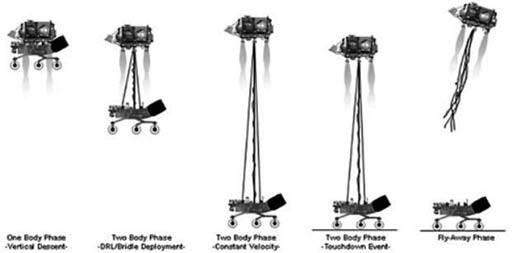
На высоте приблизительно 1,8 километра спускаемый аппарат в составе «небесного крана» и марсохода сбросил внешний корпус и теплозащитный экран и включил тормозные ракетные двигатели для замедления посадочной скорости до 1 метра в секунду. На 8-метровой высоте «небесный кран» с работающей ракетной двигательной установкой стал плавно опускать Curiosity на поверхность Марса, используя систему из трех тросов. Одновременно со спуском на тросах шесть моторизованных колес марсохода из фиксированного транспортного положения развернулись в положение для посадки. После приземления сработали пиропатроны, активизирующие тросовые резаки, и марсоход успешно отделился от «небесного крана».
Сама же летающая платформа, или «небесный кран», набрав высоту, самостоятельно приземлилась в трех сотнях метров от Curiosity. В 9:33 утра по московскому времени на Земле был получен радиосигнал с марсохода, подтвердивший успешную посадку.
Виртуальное моделирование с использованием Adams применялось для всех стадий проектирования посадочного модуля. Примечателен тот факт, что использование программных продуктов MSC Software позволило всего трем инженерам NASA создать расчетные модели для фаз разделения, спуска, приземления и развертывания Curiosity в «боевое» положение.
Марсоход Curiosity, представляющий собой наиболее важную расчетную часть, был смоделирован с высочайшим уровнем точности с включением большого числа гибких элементов, нелинейных сил жесткостей и с учетом внешнего и внутреннего демпфирования и контактного взаимодействия (рис. 6).
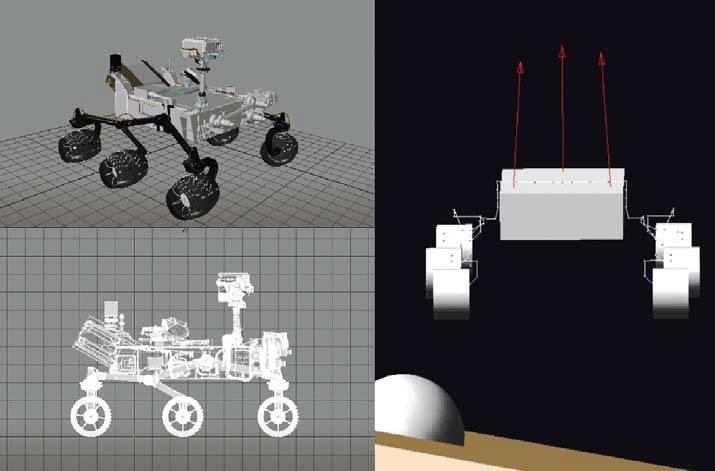
Модель спускаемого аппарата — более простая, и потому она состояла полностью из твердых тел. На начальных стадиях проекта для различных фаз посадки марсохода использовались отдельные модели. На более поздних стадиях все модели были объединены в одну с подключением системы управления. Причем реализация отдельного расчетного случая такой модели в Adams требовала всего от 17 до 93 минут на рабочей станции Hewlett-Packard под управлением операционной системы Unix.
Задача оптимизации каждого компонента полезной нагрузки заключалась в обеспечении способности марсохода и посадочного модуля выдерживать полетные нагрузки. В то же время инженерам приходилось решать задачу снижения веса всей транспортной посадочной системы из-за высокой стоимости транспортировки груза к Марсу.
Программный комплекс Adams корпорации MSC Software применялся для расчета динамики и нагрузок отдельных узлов и компонентов Curiosity, а эти нагрузки, в свою очередь, использовались для последующего прочностного анализа. Опираясь на полученные расчетные данные, конструкторы вносили необходимые изменения в проект изделия для обеспечения максимальной прочности и надежности всей системы с одновременным снижением габаритных размеров и массы.
Конечная цель и философия моделирования заключались не в попытке предсказания каждого расчетного и нерасчетного случаев со стопроцентной точностью, а в анализе ограничений, которые могут накладывать полученные нагрузки как на отдельные компоненты, так и на все изделие в целом.
До моделирования в среде Adams инженеры NASA предполагали, что расчетная максимальная скорость 1 метр в секунду во время посадки не будет вызывать чрезмерно высоких нагрузок на конструкцию марсохода. Однако моделирование показало, что нагрузки намного выше ожидаемых. Первоначальные оценки специалистов также показывали, что Curiosity будет во время посадки в неподвижном состоянии, но моделирование в Adams опровергло эти предположения — марсоход неуправляемо вращался вокруг своей оси и раскачивался в разные стороны в момент спуска при помощи «небесного крана».
В результате силовые элементы марсохода были в кратчайшие сроки дополнительно усилены.
Более поздние исследования преподнесли еще один сюрприз — процесс развертывания колес и стоек шасси марсохода производил большие нагрузки на конструкцию аппарата, чем непосредственно само приземление. В ходе компьютерного моделирования также выяснилось, что в конце развертывания колес марсохода появлялись удары, подобные ударам молотка, передающиеся не только на конструкцию Curiosity, но и на конструкции посадочного модуля.
Специалисты решили эту проблему на расчетной модели в Adams, изменяя циклограмму развертывания колес и стоек шасси. В конечном итоге был получен режим развертывания колес и стоек шасси, при котором амплитуды колебаний и силовые факторы перед посадкой были сведены к минимуму.
Результатом работы инженеров из Лаборатории реактивного движения NASA стало несколько полнофункциональных моделей посадочных систем в Adams, включая высококачественную подробную модель марсохода. На рис. 6−9 представлены некоторые из них. Работа над этим проектом была в несколько раз сложнее, чем над предыдущими проектами марсоходов, и включала разработку модели мобильного развертывания, модели разделения марсохода и летающей платформы и модели для отработки приземления.
|
|
«MSC очень гордится тем, что сделал коллектив Лаборатории реактивного движения, — сказал Доминик Галлело (Dominic Gallelo), генеральный директор и президент компании MSC Software. — Мы поздравляем коллектив NASA и рады, что наше программное обеспечение помогло осуществить это выдающееся достижение. Это всегда вдохновляет и позволяет понять, каким образом наши клиенты получают выгоду от виртуального моделирования, а порой позволяет полагаться исключительно на компьютерные технологии, чтобы выполнять такие сложные проекты, как Curiosity. Мы навсегда запомним это событие».

Корпорация MSC Software (Санта-Ана, Калифорния, США), с 1963 года работающая в области создания компьютерных технологий инженерного анализа, предлагает широкий спектр интегрированных VPD-систем — компьютерных технологий инженерного анализа и виртуального моделирования. Технологии VPD являются наиболее современными и самыми высококачественными системами инженерного анализа (CAE — Computer Aided Engineering) и предназначены для повышения качества и надежности проектирования и производства при значительном сокращении их сроков, а также существенном снижении числа опытных образцов и натурных испытаний.
Программные продукты корпорации MSC Software успешно применяются в самых различных отраслях промышленности: авиационной, ракетно-космической, автомобильной, железнодорожной, машиностроении, кораблестроении, нефтегазовом секторе, гражданском строительстве, биомедицине, а также в отраслях, связанных с разработкой и производством энергетических установок, двигателей внутреннего сгорания
В 2013 году MSC Software отметит свой 50-летний юбилей и приглашает всех желающих на XVI Всероссийскую конференцию пользователей систем MSC «MSC.Software: комплексные технологии виртуальной разработки изделий. Опыт применения на предприятиях СНГ и стран Балтии». Конференция пройдет
технический эксперт MSС Software RUS
Тел.: (495) 363−0683
E-mail: Valeriy.Shirobokov@mscsoftware.com
Скачать статью в формате PDF — 651.3 Кбайт |


